viernes, 29 de octubre de 2010
viernes, 22 de octubre de 2010
sr1 robot movil multifuncional

Presentación
El SR1 es un robot multifuncional de desarrollo y aprendizaje dirigido a aquellos entusiastas y aficionados a la robótica que quieren aprender y profundizar en la construcción real de robots móviles de experimentación. Tanto si es un recién llegado al mundo de la robótica, como si es un aficionado experto, encontrará que el robot SR1 es la plataforma idónea donde hacer todo tipos de proyectos desde un simple guiado por colisión, hasta un avanzado robot radio controlado con sistema de telemetría y capaz de enviar audio, vídeo y datos de forma inalámbrica de la misma forma que lo haría un robot como los que se mandan a explorar el espacio.El robot SR1 cuenta con un chasis lo suficientemente robusto para proteger todos los componentes mecánicos y electrónicos del robots mientras se desplaza en cualquier entorno interior. El chasis admite ampliaciones como plataformas de carga, techos con sensores, motores dc, ruedas de sumo, etc.
Desde el punto de vista de la electrónica, se ha buscado un compromiso entre versatilidad de funciones y facilidad de programación que le permita disponer de gran cantidad de sensores, además de poder incluir accesorios extras como cámaras, servos, etc. y todo ello controlable y programable desde cualquier PC sin necesidad de otro software que el proporcionado.
Por último se ha perseguido que todo el conjunto una vez montado permita hacer modificaciones, configuraciones, ampliaciones, cambios de sensores, etc. de forma muy sencilla y con la ayuda de un destornillador y poco mas.
El resultado es un robot compacto, robusto y duradero que destaca por sus múltiples y avanzadas posibilidades, su versatilidad y su gran cantidad de accesorios que incluyen ruedas todo terreno, torreta móvil, cámara inalámbrica, radio módem, etc.
Normalmente este tipo de robot solo permiten hacer pequeños montajes electrónicos de “mírame pero no me toques” ya que emplean placas de montaje de prototipo para ello, lo que significa que en el momento que el robot toca o se engancha con algún objeto se provocan averías y cortocircuitos.
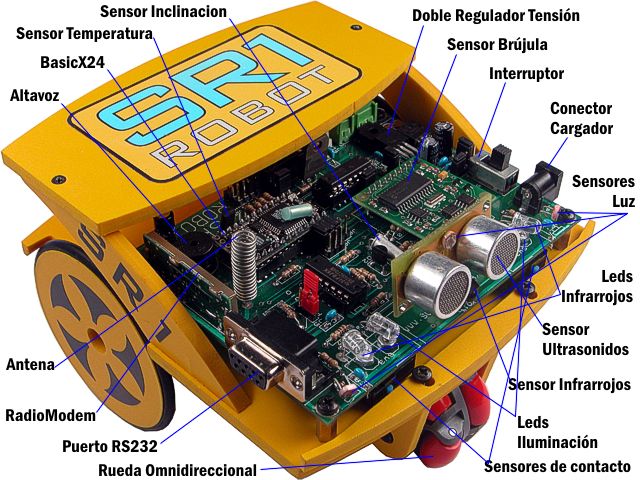
El Robot SR1 por el contrario este diseñado para que pueda desenvolverse de forma autónoma y segura en cualquier tipo de entorno interior como el hogar, la escuela o la oficina, siendo capaz de eludir y superar los obstáculos y trampas, como muebles, cables, patas, rincones, etc, que encuentra a su paso gracias a su gran cantidad de sensores entre los que destacan:
- 2 Sensores de contacto.
- 1 Sensor de inclinación
- 2 Sensores de luz.
- 1 Sensor de infrarrojos modulados
- 1 Sensor de distancia pos ultrasonido + 1 sensor de luz central
- 1 Sensor de temperatura digital
- 1 Sensor brújula digital
- 1 Zumbador piezoeléctrico.
- 2 Emisores de infrarrojos.
- 2 Diodos led de alta potencia
- 2 Leds rojo y verde de señalización.
- 4 Conexiones para servomotores
- 1 Controlador para 2 motores de corriente continua.
- 1 Puerto serie RS232.
- 1 Radio Módem inalámbrico
- 1 Conector para periféricos.
- 1 Alimentación Auxiliar.
Comenzando por la utilización del entorno de edición de BasicX y mostrando poco a poco como se realiza cada paso, el completo manual permite que cualquiera sin ningún tipo de experiencia en programación, sea capaz de cargar y ejecutar los diferentes programas que se acompañan y entender y comprender su funcionamiento.
También se incluye toda la documentación en castellano necesaria como el manual del usuario de mas de 200 páginas con instrucciones precisas y gran cantidad de ilustraciones en las que se muestra como construir el robot paso a paso, referencia del lenguaje BasicX, manual de entorno de programación, etc... por lo que contará con todas las herramientas necesarias para programar el robot de forma rápida y sencilla sin tener que ser un experto. El robot puede ser montado, incluyendo el circuito electrónico, por niños desde 12 años de edad, con solo seguir las instrucciones proporcionadas y un poco de supervisión por parte de un adulto.
Entre los programas suministrados están:
- Calibración del Robot
- Primeros Pasos
- Navegación Básica
- Navegación Inteligente
- Navegación por infrarrojos
- Navegación Buscando Luz
- Navegación por Ultrasonidos
- Navegación Siguiendo la Línea
- Navegando con ruedas de sumo
- Navegación por Radio Control
- Perro guardián
- El robot explorador
Suscribirse a:
Entradas (Atom)